Building the tow boogie I am using the Maytech MTSKR1905WF Remote and the MakerX Hi200/75V VESC together with the Flipsky 65161 motor. Here are som some quick notes about the settings I have used to get things to work as I want.
There is a circuits diagram on the Maytech page which makes it easy to connect the remote receiver and the VESC together using the pinout picture on the MakerX page.
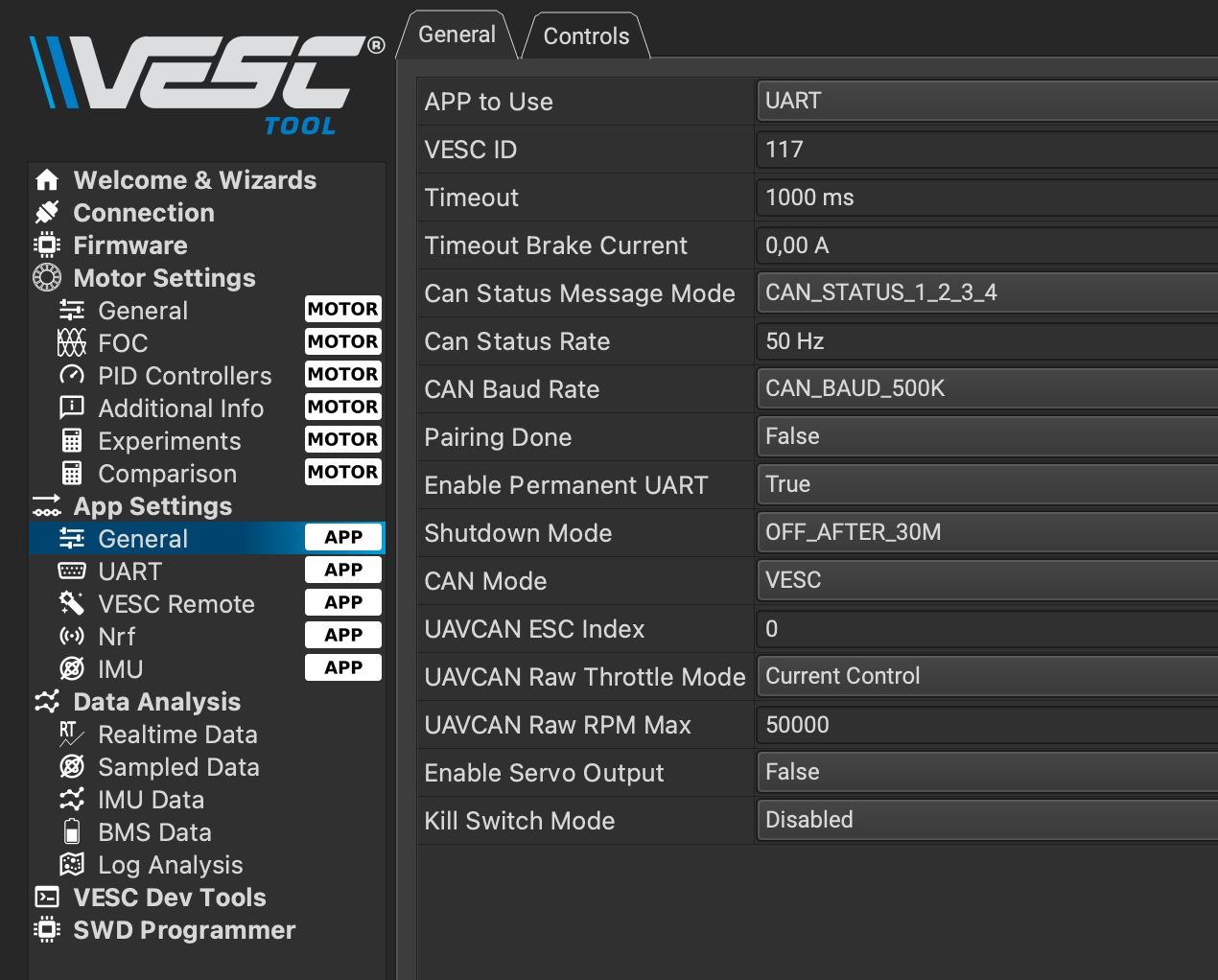
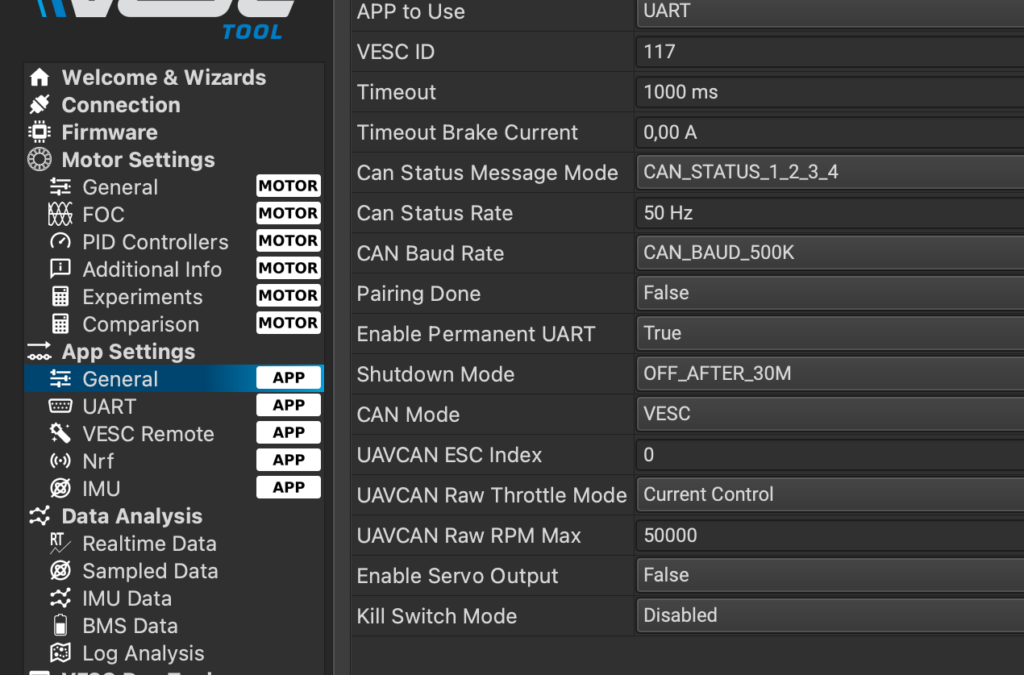
VESC App settings:
- if you are using firmware version 5.03 (VESC TOOL 3.1) or above – turn off the phase filter, see here for more details
- Set App to Use to UART – gives much quicker response than the Maytech recommended UART and PPM.
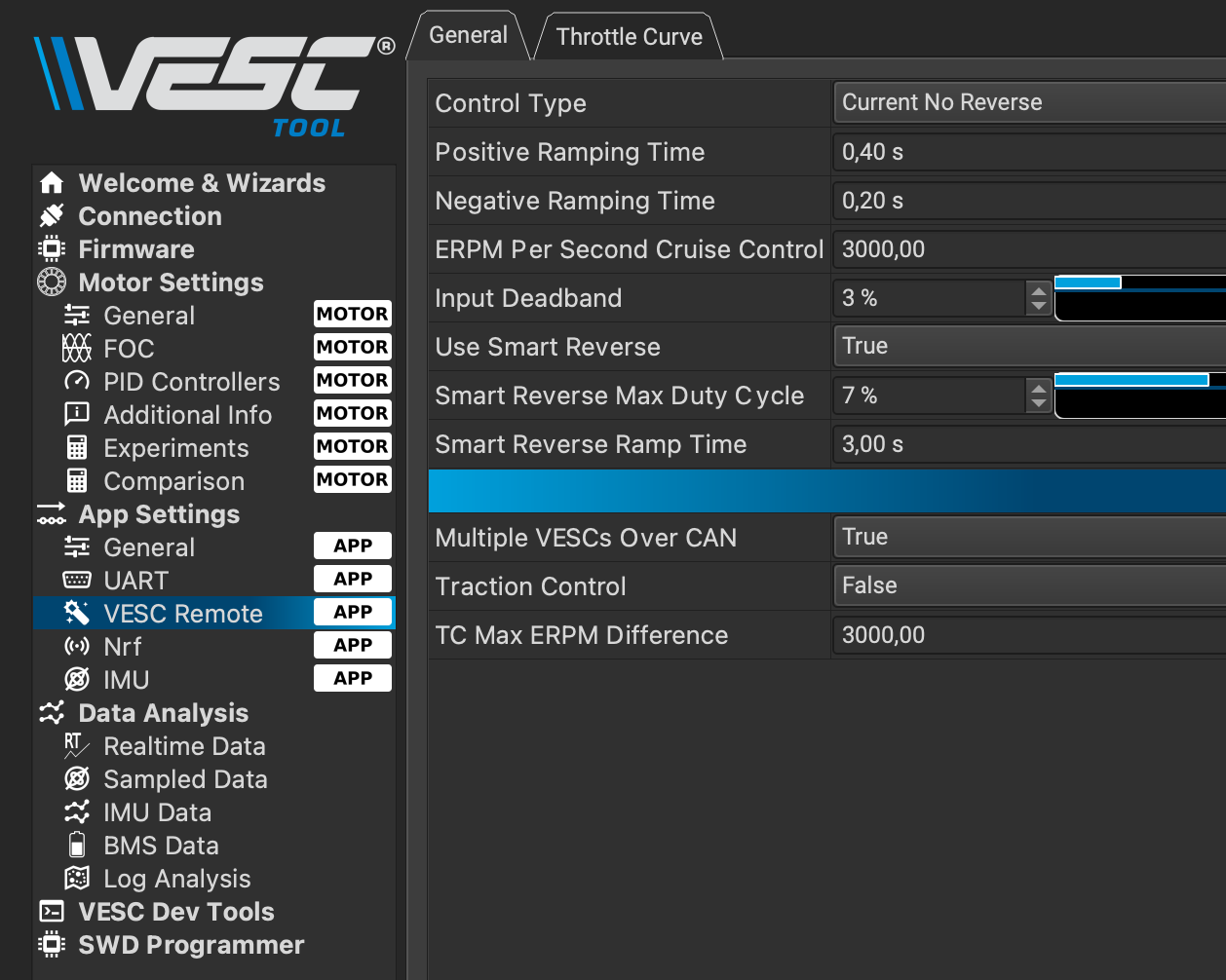
- Use the Maytech recommended Control Type: Current No Reverse under VESC Remote
- For quicker response on the remote, change the Input Deadband to something like 3% under VESC Remote
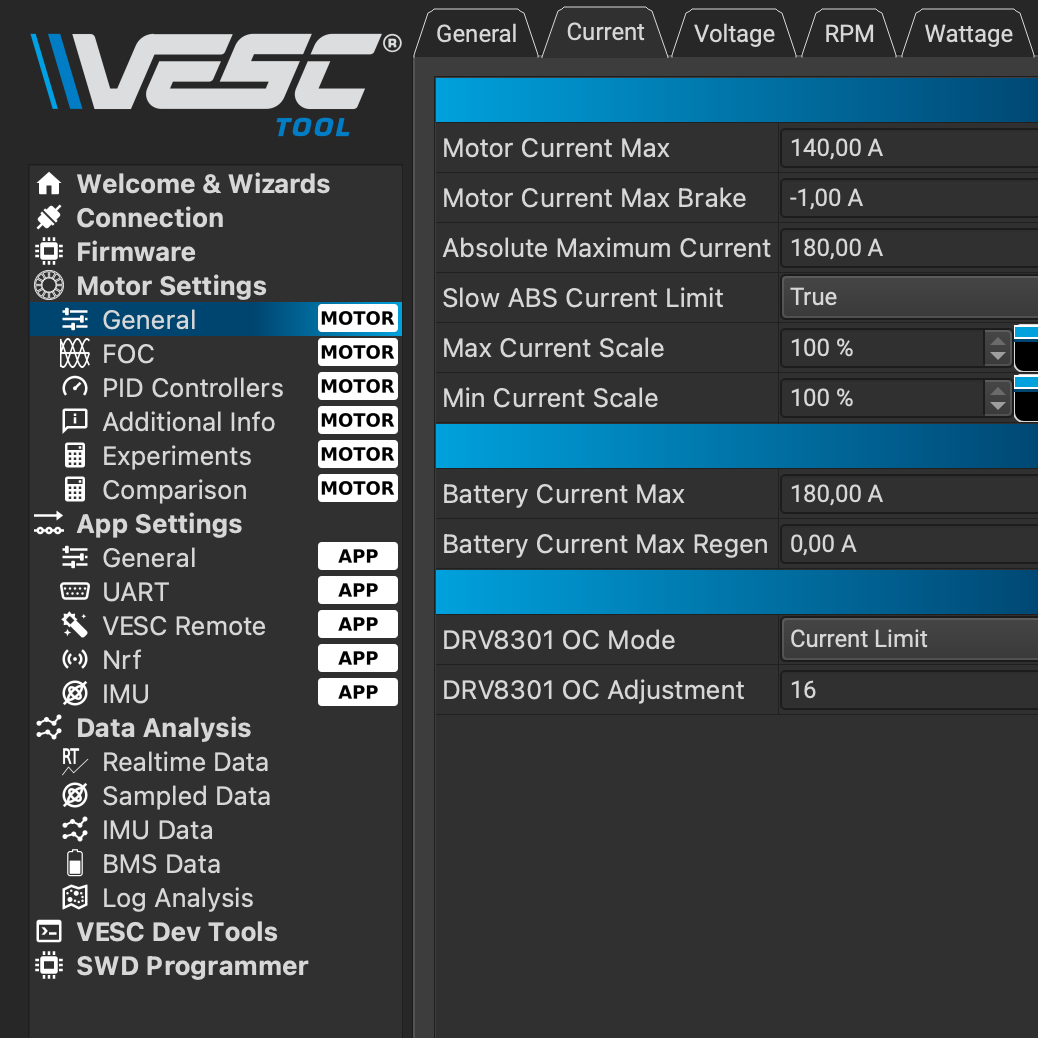
VESC Motor Settings:
- Set Motor Current Max to 140A
- Do not set Motor Current Max Brake to 0A but some negativa number like -1A
- Set Absolute Maximum Current to 180A
Here are some screen dumps to better explain the settings