I found https://github.com/koosoli/ESPHomeDesigner before Christmas and it seemed to be a really nice tool so decided to try it out. And soon I was contributing some. Here is some notes from that.
cd /tmp
git clone https://github.com/koosoli/ESPHomeDesigner.git
cd ESPHomeDesigner
git switch testing
git pull
cp -r custom_components/esphome_designer /homeassistant/custom_components
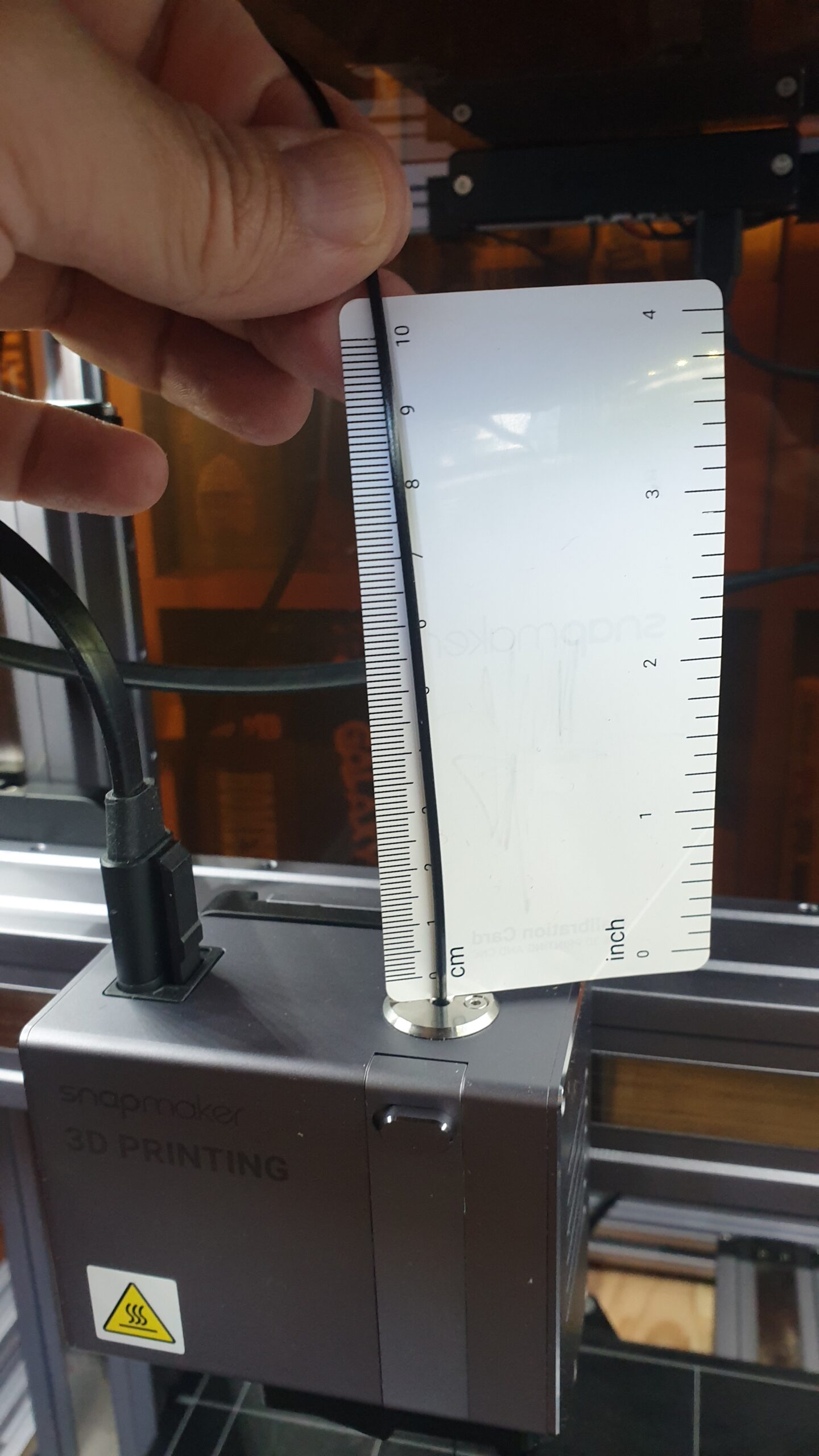
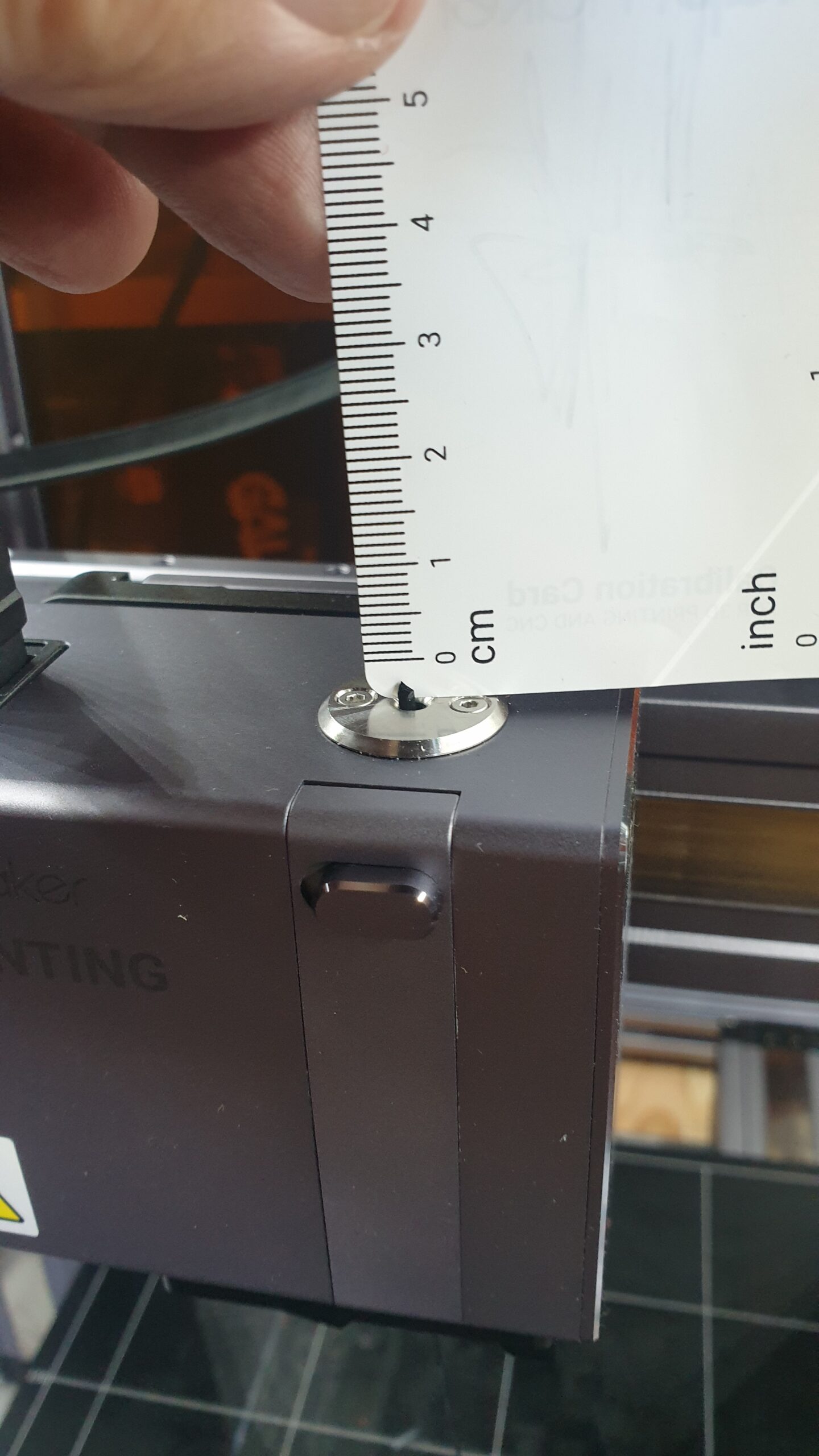
I use the calibration card to measure and cut the filament at 10 on the card, i.e 100mm plus the dead space before the 0. But since I measure the extruded distance also with this space it can be ignored.
Make sure the hot end has reached the correct temperature for the filament you are calibrating with. And issue the command to start feeding the 100mm of filament. Once that finished measure the amount of filament left.
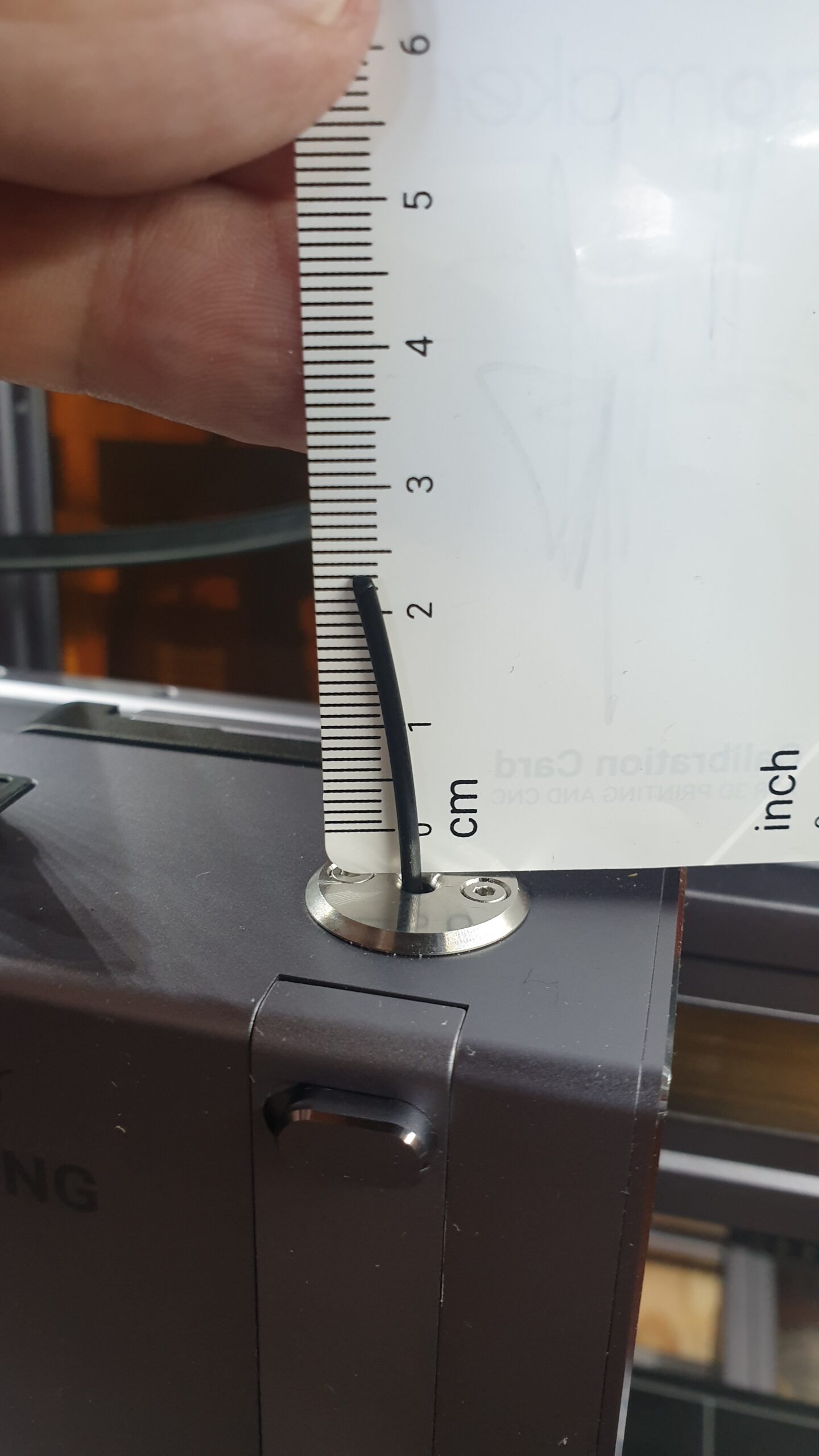
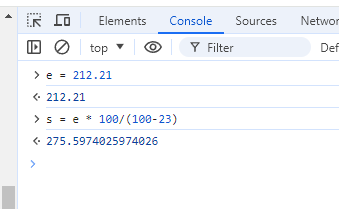
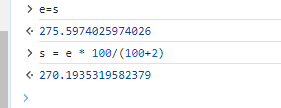
I had 23mm left this time. Then it is time to do the calculation. I find it easiest to start the developer tools in the browser. In the console there I just enter the expressions in the article.
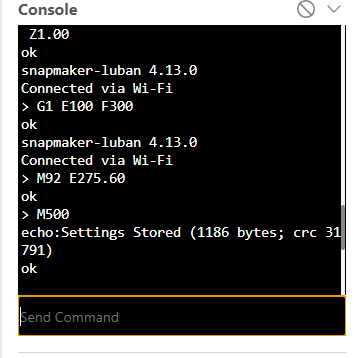
Then use the Luban console to enter the newly calculated value and permanently store it. If you want to understand the M-commands like M92 this page was good, https://snapmaker.github.io/Documentation/gcode/M092
Finally make a test run with the same command that feeds 100mm of filament. Mine fed a few mm of extra filament.
This time I ignored the difference but if you want you can re-calibrate. Use your calculated S value as the new E in the calculation and enter how much filament that has been fed. Repeat until you are satisfied.
I found Timbo’s tips on how to make a track from photos but it did not work straight out of the box for me. The problem was two fold; first I needed to change ” to ‘ but also gpsdatetime tag did not exists but changing to DateTimeOriginal made it work: exiftool -r -if '$DateTimeOriginal' -fileOrder DateTimeOriginal -p ./gpx.fmt ./*.jpg > track.gpx
But it also required me to to modify the gpx.fmt file.
There is a circuits diagram on the Maytech page which makes it easy to connect the remote receiver and the VESC together using the pinout picture on the MakerX page.
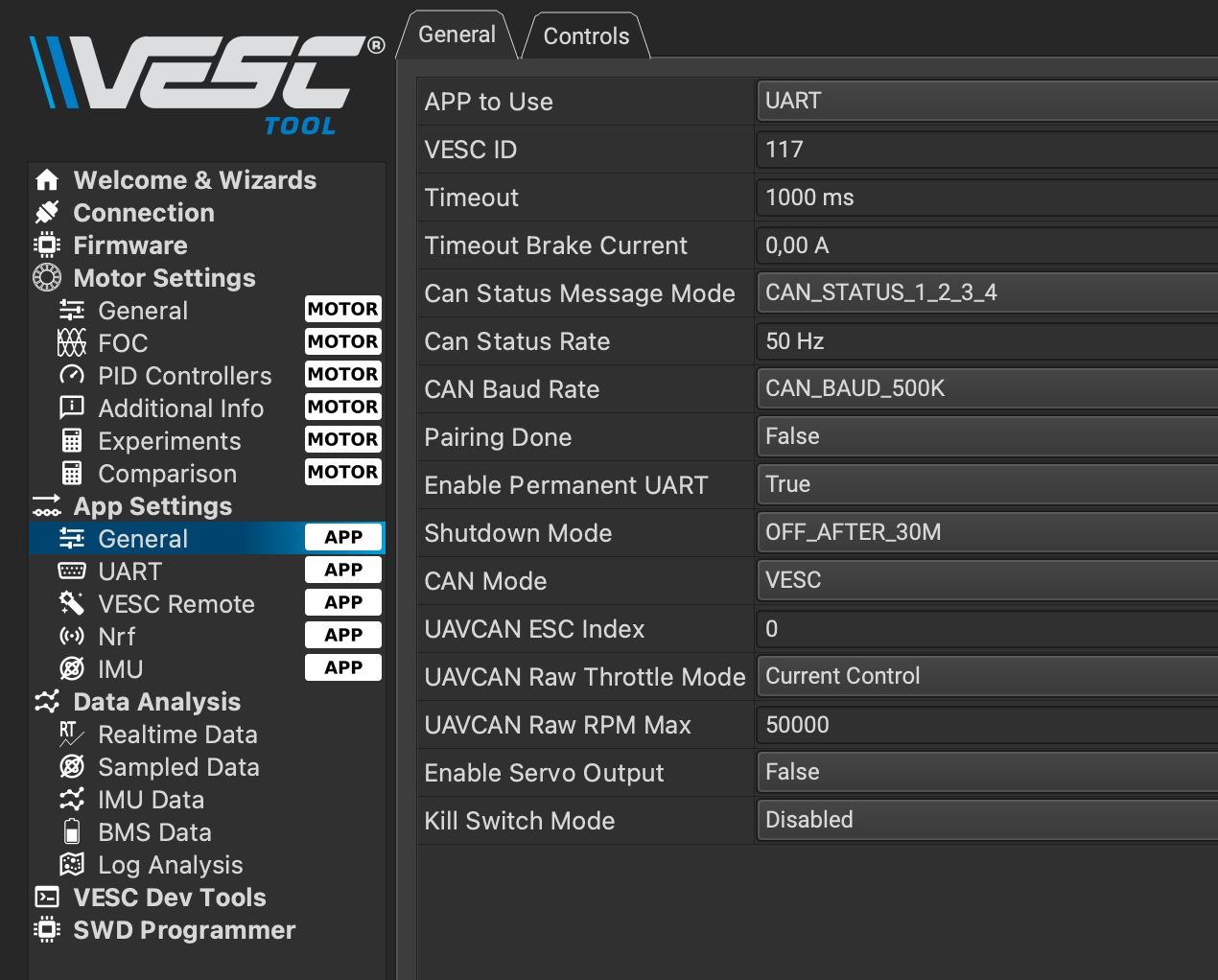
VESC App settings:
if you are using firmware version 5.03 (VESC TOOL 3.1) or above – turn off the phase filter, see here for more details
Set App to Use to UART – gives much quicker response than the Maytech recommended UART and PPM.
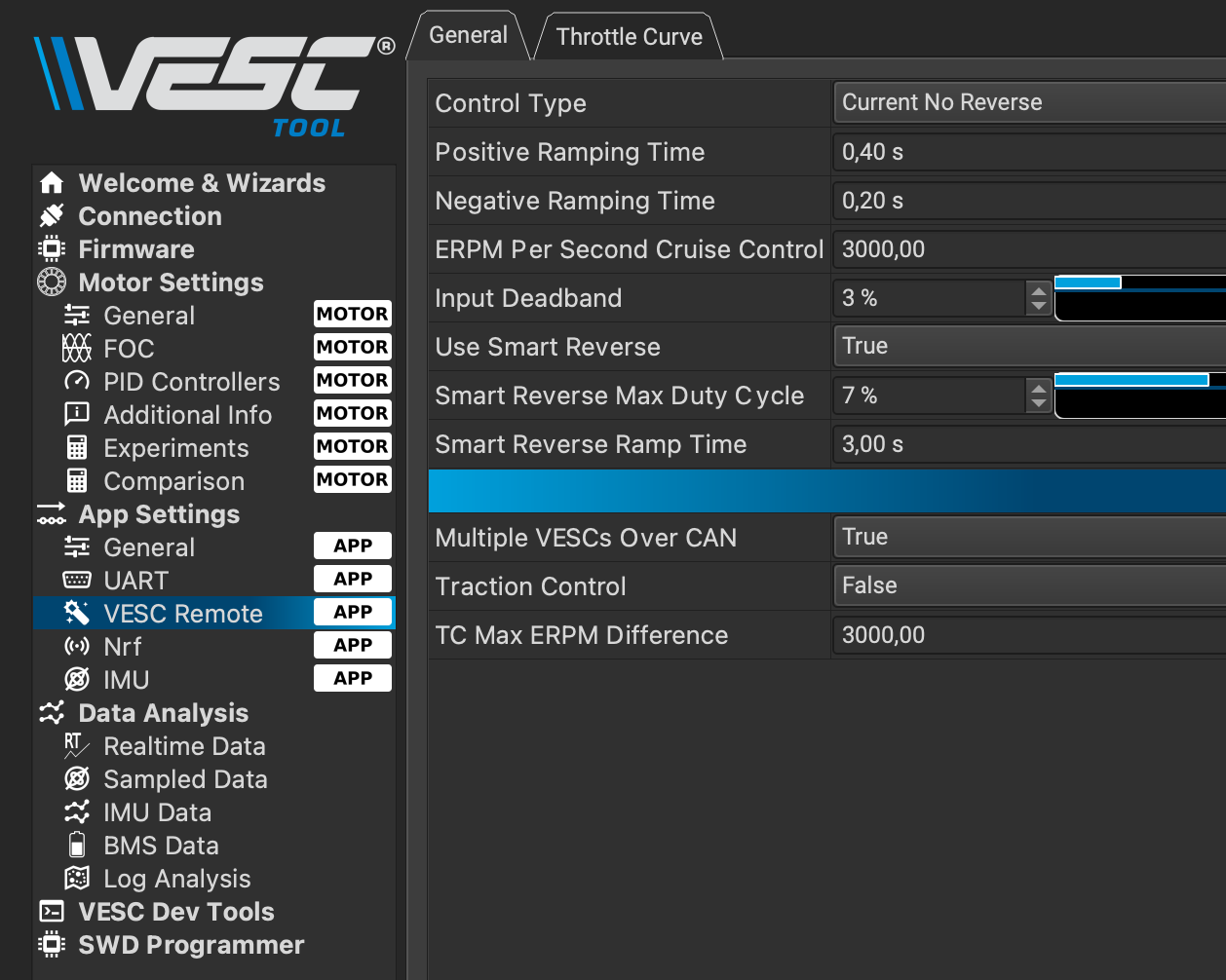
Use the Maytech recommended Control Type: Current No Reverse under VESC Remote
For quicker response on the remote, change the Input Deadband to something like 3% under VESC Remote
VESC Motor Settings:
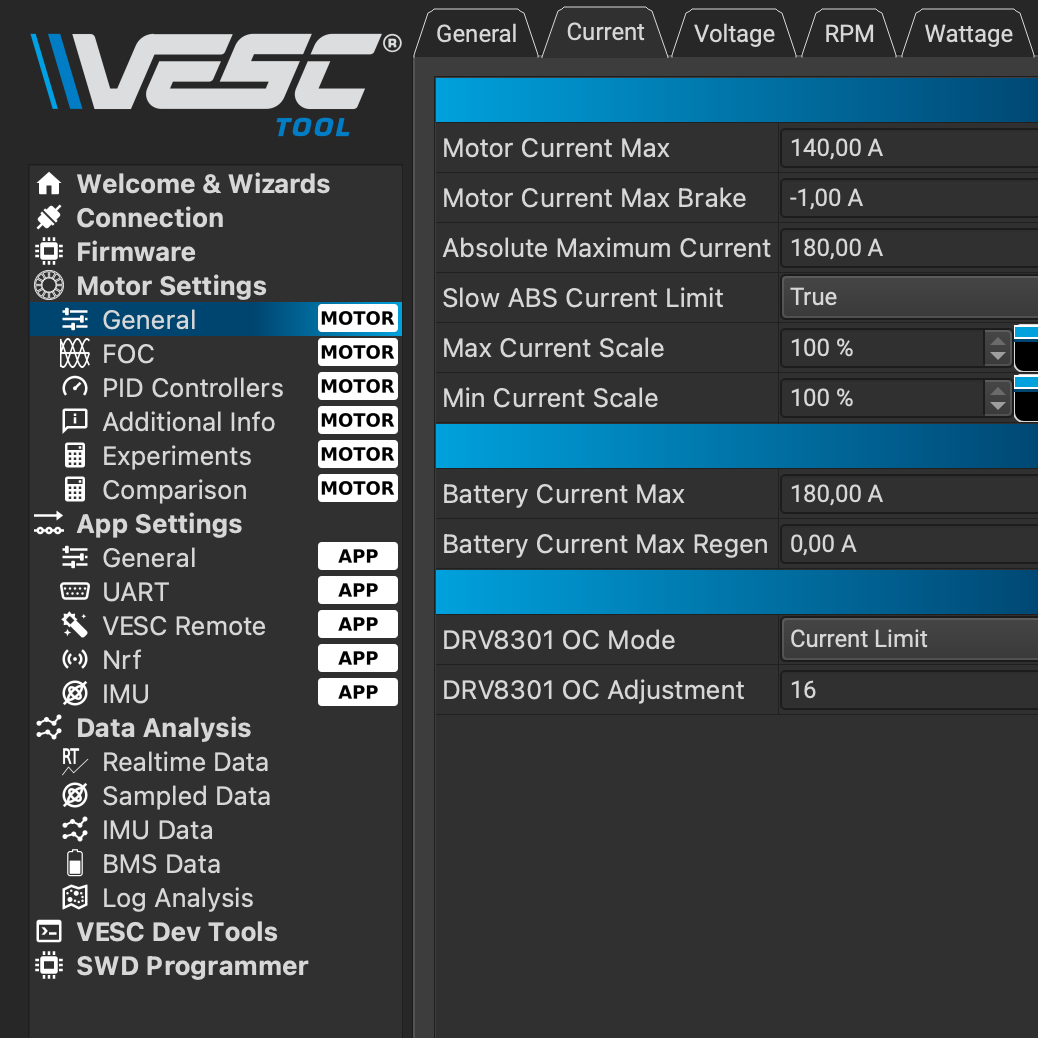
Set Motor Current Max to 140A
Do not set Motor Current Max Brake to 0A but some negativa number like -1A
Set Absolute Maximum Current to 180A
Here are some screen dumps to better explain the settings
App to Use: UARTVESC Remote settingsMotor Settings
Äntligen går det lätt att regga sig för att slippa adresserad reklam! Plus man slipper den vanliga reklamen med!
Dock dom har lite kvar o fixa på sajten, jag klarade inte registrera mig via Flock utan var tvungen att köra Internet Explorer. Men det är nog bara lite barnsjukdomar så här i starten! Så hjälp dem gärna att sprida ordet och få chans och få ett år reklamfritt spotify med!!